Networking
Before running the VMC software, we highly recommend that you configure
the Jetson to act as it’s own WiFi network you can connect to. To do this,
login to the Jetson, go into the “VMC” directory,
and run the command ./scripts/wifi.py create:
cd ~/AVR-2022/VMC/
./scripts/wifi.py create
This will walk you through creating a WiFi network that you can connect to.
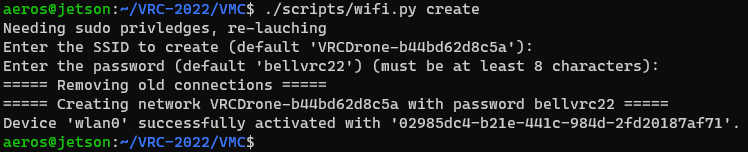
WiFi setup wizard
Tip
You can also use the the disconnect command to disconnect from all WiFi networks
and disable the hotspot, or the connect command to more easily connect to an
existing WiFi network.
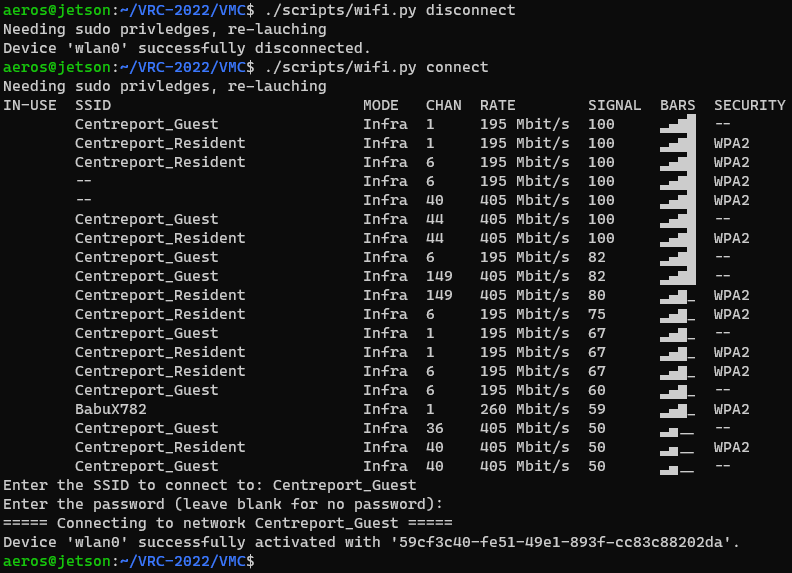
Disconnect/Connect to WiFi networks
After connecting to the WiFi network, your Jetson will always have the IP address
10.42.0.1, which you can use to
connect to via SSH.
Running
After connecting to your Jetson via the hotspot, go into the “VMC” directory,
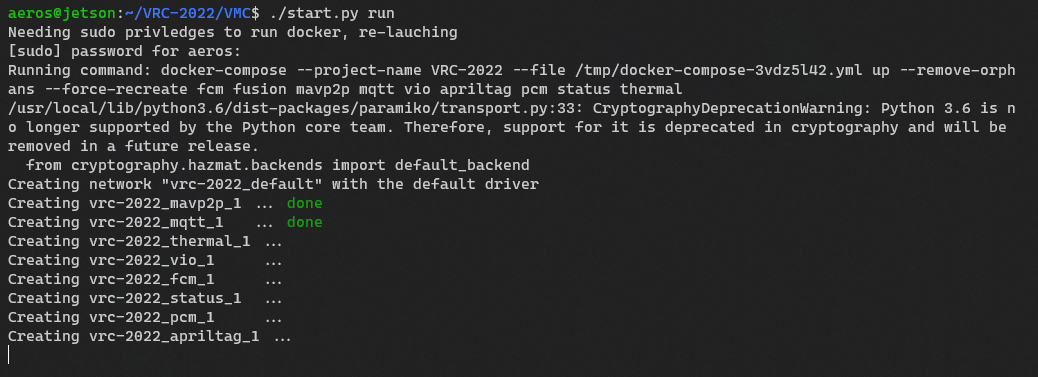
and run the command ./start.py run:
cd ~/AVR-2022/VMC/
./start.py run
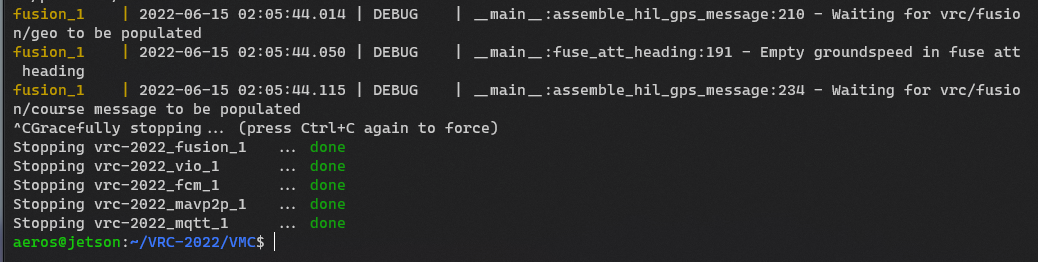
To shutdown the software, press Ctrl+C in the console window you started the software in. Additionally, run
./start.py stop
for good measure.
Options
With the basics out of the way, there are some options that can be used to control which parts of the software are run. By default, a normal set of modules are run:
./start.py run
# also equivalent to
./start.py run --norm
./start.py run -n
- fcm
- fusion
- mavp2p
- mqtt
- vio
- apriltag
- pcm
- status
- thermal
However, let’s say you have just the bare minimum equipment installed on your drone
(just the ZED Mini camera). You can use the --min option to run only the
following modules which are the bare minimum required for flight:
./start.py run --min
# also equivalent to
./start.py run -m
- fcm
- fusion
- mavp2p
- mqtt
- vio
On the other hand, if you have everything installed, and also
want to run your own code in the sandbox module you can use the --all option:
./start.py run --all
# also equivalent to
./start.py run -a
- fcm
- fusion
- mavp2p
- mqtt
- vio
- apriltag
- pcm
- status
- thermal
- sandbox
Lastly, if you want to run modules not defined in a preset here, you can either list them all out explicitly, or add the additional modules you want to an exisiting alias:
# the following are equivalent
./start.py run pcm --min # the --min must come at the end
./start.py run fcm vio mqtt mavp2p fusion pcm
If you ever need help, just add the --help argument to the command:
usage: start.py [-h] [-l] [-m | -n | -a] {run,build,pull,stop} [modules ...]
positional arguments:
{run,build,pull,stop}
Action to perform
modules Explicitly list which module(s) to perform the action one
optional arguments:
-h, --help show this help message and exit
-l, --local Build containers locally rather than using pre-built ones from GitHub
-m, --min Perform action on minimal modules (fcm, fusion, mavp2p, mqtt, vio). Adds to any modules explicitly specified.
-n, --norm Perform action on normal modules (apriltag, fcm, fusion, mavp2p, mqtt, pcm, status, thermal, vio). Adds to any modules explicitly specified. If nothing else is specified, this
is the default.
-a, --all Perform action on all modules (apriltag, fcm, fusion, mavp2p, mqtt, pcm, sandbox, status, thermal, vio). Adds to any modules explicitly specified.
Troubleshooting
Sometimes when starting the AVR software, things don’t all start correctly.
Cannot start service pcm
Example output:
Needing sudo privileges to run docker, re-launching
Running command: docker-compose --project-name AVR-2022 --file /tmp/docker-compose-v5eqlg13.yml up --remove-orphans --force-recreate pcm
/usr/local/lib/python3.6/dist-packages/paramiko/transport.py:33: CryptographyDeprecationWarning: Python 3.6 is no longer supported by the Python core team. Therefore, support for it is deprecated in cryptography and will be removed in a future release.
from cryptography.hazmat.backends import default_backend
Creating network "avr-2022_default" with the default driver
Creating avr-2022_mqtt_1 ... done
Creating avr-2022_pcm_1 ... error
ERROR: for avr-2022_pcm_1 Cannot start service pcm: error gathering device information while adding custom device "/dev/ttyACM0": no such file or directory
ERROR: for pcm Cannot start service pcm: error gathering device information while adding custom device "/dev/ttyACM0": no such file or directory
ERROR: Encountered errors while bringing up the project.
This error means that the AVR software was unable to connect to the PCC. If you are not using the PCC, follow the steps above to disable that module.
Otherwise, to test that the PCC is correctly connected to the VMC, run the command:
ls /dev/ttyACM0
You’ll get the message ls: cannot access '/dev/ttyACM0': No such file or directory
if the PCC is not connected. If the PCC is connected,
/dev/ttyACM0 will get echoed back.
Try unplugging the PCC and plugging it back into the VMC.