PX4 Firmware
2 minute read
Uploading PX4 firmware using QGC
PX4 is firmware that we will be running on the AVR drone. It is an open-source flight stack containing all the software necessary to get your drone into the air.
To facilitate some of the extra functionality required for our drone
to fly in stabilized flight mode without a GPS, you will need a custom version of PX4
Bell engineers have developed. Go to the latest
AVR software release
and download the px4_fmu-v6c_default.<px4 version>.<hash>.px4 file.
Note
Be sure you grab the correct 6c firmware, there will also be a 6x build,px4_fmu-v6x_default, but that is for a different flight controller
and is NOT to be used.
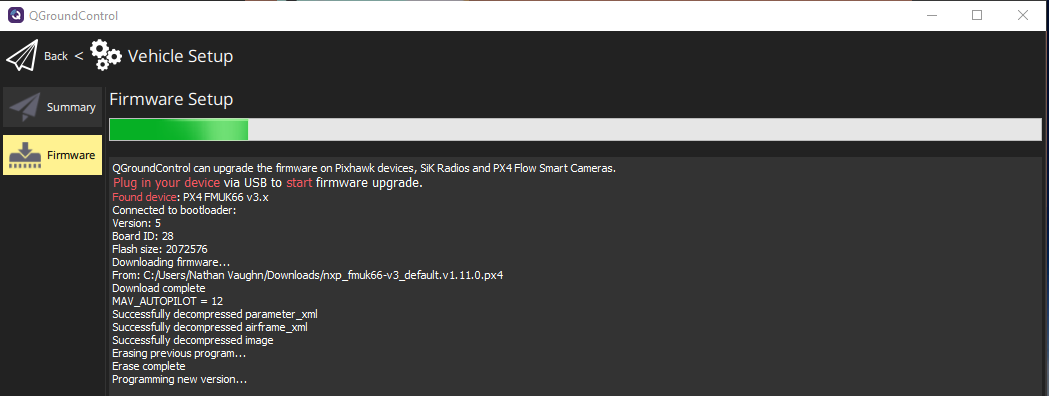
In the Firmware screen in QGroundControl you can upload a new version of PX4. To access the firmware screen make sure to click on the Q logo in the top left of the screen and then click on Vehicle Setup > Firmware. You will see the following screen.

Firmware upload screen in QGC
Note
Make your FC is NOT plugged in when accessing the firmware setup screen. First access the firmware screen and THEN plug in your FC. It will recognize the connection and initiate the process.QGC will ask you to plug in your FC using a USB cable. A popup will appear that asks you which firmware you want to use. select “Advanced Settings”, then “Custom firmware file…”
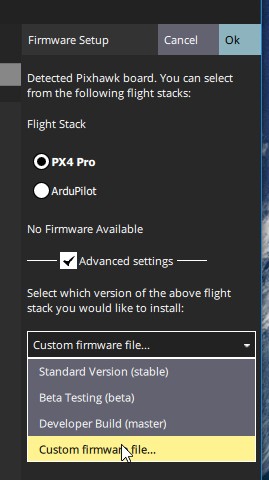
Loading PX4 Pro Stable Release onto FC
Then click “Ok” and select the firmware file you downloaded. Now, you will see a progress bar. This process should take no more than 2-3 minutes.
After the PX4 firmware is successfully loaded you will be presented with the default Vehicle Setup screen. It is necessary to go through the following steps to ensure a reliable and stable first flight.
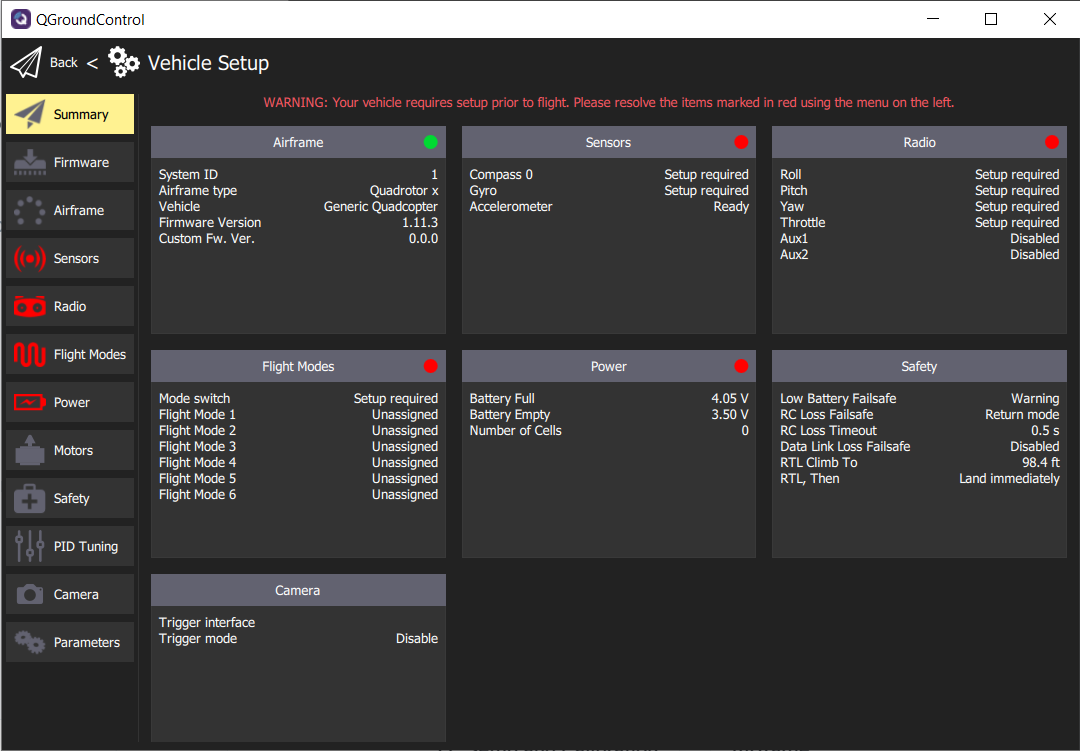
QGC Vehicle Setup screen right after PX4 firmware load
←Previous Next→