General
The software for AVR is designed around a pub/sub messaging system in order to exchange data throughout the system. This allows software modules to operate independently of each other, and to communicate with each other over a network.
A pub/sub messaging system is a system which allows clients to publish data to “topics” and clients can subscribe to incoming messages on defined topics. Think of how email works for example. You sending an email to someone is like publishing data to a topic (their email address), and you subscribe to all messages on a topic (your email address). However, a pub/sub system allows multiple clients to subscribe to the same topic.
With that in mind, the core principles of AVR software architecture are as follows:
- Data exchange must happen through the MQTT broker.
- All MQTT data must be JSON encoded.
- All modules are run as containers.
Because of all of the hardware components of AVR (PCC, FCC, thermal camera, etc.), what this generally means is that each module acts as a hardware to MQTT adapter. For example, the FCM module publishes telemetry data over MQTT, and feeds fake GPS data from MQTT to the FCC.
This modular, open system makes it simple to add new modules or functionality to AVR. The GUI for example, is 100% based on consuming MQTT data.
Modules
Here is a description of the modules in AVR and what they all do.
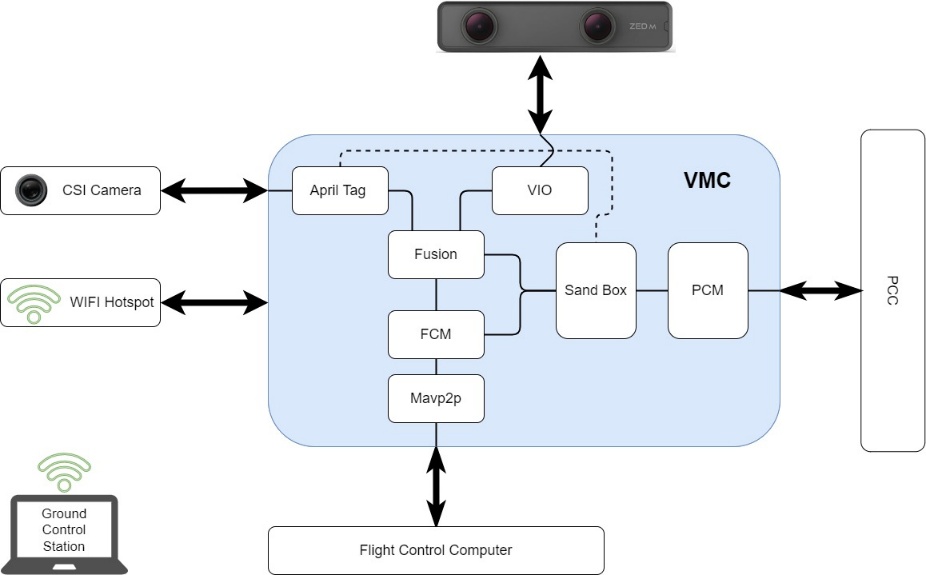
Module Flowchart
AprilTag
The AprilTag module is responsible for using the images pulled from the CSI camera to scan for visible AprilTags.
A low-level C++ program captures the images and hands them off to the Jetson’s GPU for processing and publishes the raw detections to the “avr/apriltags/raw” topic.
From here, a second Python program inside the module subscribes to this topic, and upon new detections, uses linear algebra to perform a coordinate transformation in order to get several pieces of data. These detections include the tags ID, as well as the drone’s absolute location in the court (pos_world), and the drones relative location to the tag itself (pos_rel).
This data is then broadcast out over MQTT for other modules, such as the Fusion and Sandbox modules to consume.
This is the only module with C++ code, for performance reasons.
Flight Control
The Flight Control module (FCM) is responsible for communicating with the FCC over MAVLink. This module takes telemetry data from the FCC and publishes it over MQTT. Additionally, it takes fake GPS data from the Fusion module and feeds it to the FCC.
There also exists functionality to send commands to the FCC, such as arming the drone, or sending it missions, but this is disabled due to the drone’s current lack of knowledge of where it is in global coordinates.
Fusion
The Fusion module is responsible for fusing multiple data sources to produce the final fake GPS data that is fed to the FCC. Currently, this only takes data from the VIO module, but experimental functionality exists to also take data from the AprilTag module to position itself more accurately in global coordinates.
This is the only module which is pure Python and has no hardware component.
Mavp2p
The Mavp2p module is responsible for bridging multiple MAVLink connections together. This is just a Docker container for the amazing open-source project mavp2p.
MQTT
The MQTT module is responsible for running the MQTT broker. This is a thin wrapper around the docker.io/library/eclipse-mosquitto container with a configuration baked in.
The port 18330 is used instead of the normal 1883 port because it puts it outside of the normal operating system privileged port range.
Peripheral Control
The Peripheral Control module is responsible for communicating with the PCC over serial. This is a thin MQTT to serial bridge.
Status
The Status module is responsible for consuming status information from the various other modules and updating the status LEDs connected to the VMC. This also communicates some with the host Jetson as well to check if it’s being power-limited.
Thermal
The Thermal module is responsible for capturing thermal images from the thermal camera and publishing them over MQTT.
Visual Inertial Orientation
The Visual Inertial Orientation (VIO) module is responsible for capturing data from the stereoscopic tracking camera, and converting it into global-ish coordinates.
This module considers wherever it is started as “0,0,0” and thus the drone’s movements are relative to that. Because PX4 only thinks in global coordinates, this module then uses a hardcoded latitude and longitude to convert the data into global coordinates. They’re not true global coordinates, however, as they’re still relative to where it was started.
This module is the core of the AVR “secret sauce” to enable GPS-denied stabilized flight.